Automatic Control Knowledge Repository
You currently have javascript disabled. Some features will be unavailable. Please consider enabling javascript.Details for: "tracking controller design and nonlinear trajectory planning for a two mass floating-body system"
Name: tracking controller design and nonlinear trajectory planning for a two mass floating-body system
(Key: 04NUJ)
Path: ackrep_data/problem_solutions/nonlinear_trajectory_two_mass_floating_bodies View on GitHub
Type: problem_solution
Short Description:
Created: 2020-12-30
Compatible Environment: default_conda_environment (Key: CDAMA)
Source Code [ / ] solution.py
Solved Problems: trajectory tracking of a two mass hovering system |
Used Methods: method_trajectory_planning
Result: Success.
Last Build: Checkout CI Build
Runtime: 8.2 (estimated: 10s)
Plot:
The image of the latest CI job is not available. This is a fallback image.
Path: ackrep_data/problem_solutions/nonlinear_trajectory_two_mass_floating_bodies View on GitHub
Type: problem_solution
Short Description:
Created: 2020-12-30
Compatible Environment: default_conda_environment (Key: CDAMA)
Source Code [ / ] solution.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
problem solution for control problem: design a tracking controller by using nonlinear trajectory planning
to stabilize a unstable system with initial error
"""
import sympy as sp
import symbtools as st
import matplotlib.pyplot as plt
import method_trajectory_planning as tp # noqa
from scipy.integrate import odeint
import ipydex # noqa
import os
from ackrep_core.system_model_management import save_plot_in_dir
class SolutionData:
pass
def rhs_for_simulation(f, g, xx, controller_func):
"""
# calculate right hand side equation for simulation of the nonlinear system
:param f: vector field
:param g: input matrix
:param xx: states of the system
:param controller_func: input equation (trajectory)
:return: rhs: equation that is solved
"""
# call the class 'SimulationModel' to build the
# 'right hand side' equation for ode
sim_mod = st.SimulationModel(f, g, xx)
rhs_eq = sim_mod.create_simfunction(controller_function=controller_func)
return rhs_eq
def solve(problem_spec):
t = sp.Symbol("t")
planer_p2 = tp.Trajectory_Planning(
problem_spec.YA_p2, problem_spec.YB_p2, problem_spec.t0, problem_spec.tf, problem_spec.tt
)
mod = problem_spec.rhs(problem_spec.ttheta, problem_spec.tthetad, problem_spec.u_F)
planer_p2.mod = mod
planer_p2.yy = problem_spec.output_func(problem_spec.ttheta, problem_spec.u_F)
planer_p2.ff = mod.f # xd = f(x) + g(x)*u
planer_p2.gg = mod.g
yy = planer_p2.cal_li_derivative() # lie derivatives of the flat output
ploy_p2 = planer_p2.calc_trajectory() # planned trajectory of CuZn-ball
p2_func = st.expr_to_func(t, ploy_p2[0]) # trajectory to function
# find trajectory of Fe-ball
p1_p2 = planer_p2.ff[3].subs(problem_spec.ttheta[1], ploy_p2[0])
func_p1 = p1_p2 - ploy_p2[2]
ploy_p1 = sp.solve(func_p1, problem_spec.ttheta[0])
p1_func = st.expr_to_func(t, ploy_p1[0])
yy_4 = yy[4].subs([(problem_spec.ttheta[0], ploy_p1[0]), (problem_spec.ttheta[1], ploy_p2[0])])
in_output_func = yy_4 - ploy_p2[4]
# input force trajectory
input_f_tra = sp.solve(in_output_func, problem_spec.u_F)
f_func = st.expr_to_func(t, input_f_tra)
# input current trajectory
f_c_func = problem_spec.force_current_function(problem_spec.ttheta, problem_spec.u_i)
c_tra_func = (input_f_tra[0] - f_c_func).subs([(problem_spec.ttheta[0], ploy_p1[0])])
input_c_tra = sp.solve(c_tra_func, problem_spec.u_i)
current_func = st.expr_to_func(t, input_c_tra[1])
# tracking controller
tracking_controller = tp.Tracking_controller(yy, mod.xx, problem_spec.u_F, problem_spec.pol, ploy_p2)
control_law = tracking_controller.error_dynamics()[0] # control law
# simulate the system with control law
rhs = rhs_for_simulation(planer_p2.ff, planer_p2.gg, mod.xx, control_law)
# original initial values : [0.0008, 0.004, 0, 0]
res = odeint(rhs, problem_spec.xx0, problem_spec.tt2)
solution_data = SolutionData()
solution_data.res = res # output values of the system
solution_data.ploy_p1 = p1_func # desired full transition of p1
solution_data.ploy_p2 = p2_func # desired full transition of p2
solution_data.f_func = f_func # required magnet force input
solution_data.current_func = current_func # required current input
solution_data.coefficients = tracking_controller.coefficient # coefficients of error dynamics
solution_data.control_law = control_law # control law function
save_plot(problem_spec, solution_data)
return solution_data
def save_plot(problem_spec, solution_data):
# plotting
plt.figure(1) # Fe-ball p1
plt.plot(problem_spec.tt1, solution_data.ploy_p1(problem_spec.tt1), ":", zorder=-1, label="desired full transition")
plt.plot(
problem_spec.tt, solution_data.ploy_p1(problem_spec.tt), "r-", linewidth=2, label="desired state transition"
)
plt.plot(problem_spec.tt2, solution_data.res[:, 0], "k", label="actual trajectory")
plt.plot(0, 0.005, "rx", label="controller switch in")
plt.title("trajectory of Fe-Ball")
plt.xlabel("time [s]")
plt.ylabel("position [m]")
plt.legend(loc=4)
plt.figure(2) # CuZn-ball p2
plt.plot(problem_spec.tt1, solution_data.ploy_p2(problem_spec.tt1), ":", zorder=-1, label="full transition")
plt.plot(problem_spec.tt, solution_data.ploy_p2(problem_spec.tt), "r-", linewidth=2, label="state transition")
plt.plot(problem_spec.tt2, solution_data.res[:, 1], "k", label="reale Trajektorie")
plt.plot(0, 0.045, "rx", label="controller switch in")
plt.title("trajectory of CuZn-Ball")
plt.xlabel("time [s]")
plt.ylabel("position [m]")
plt.legend(loc=4)
plt.figure(3)
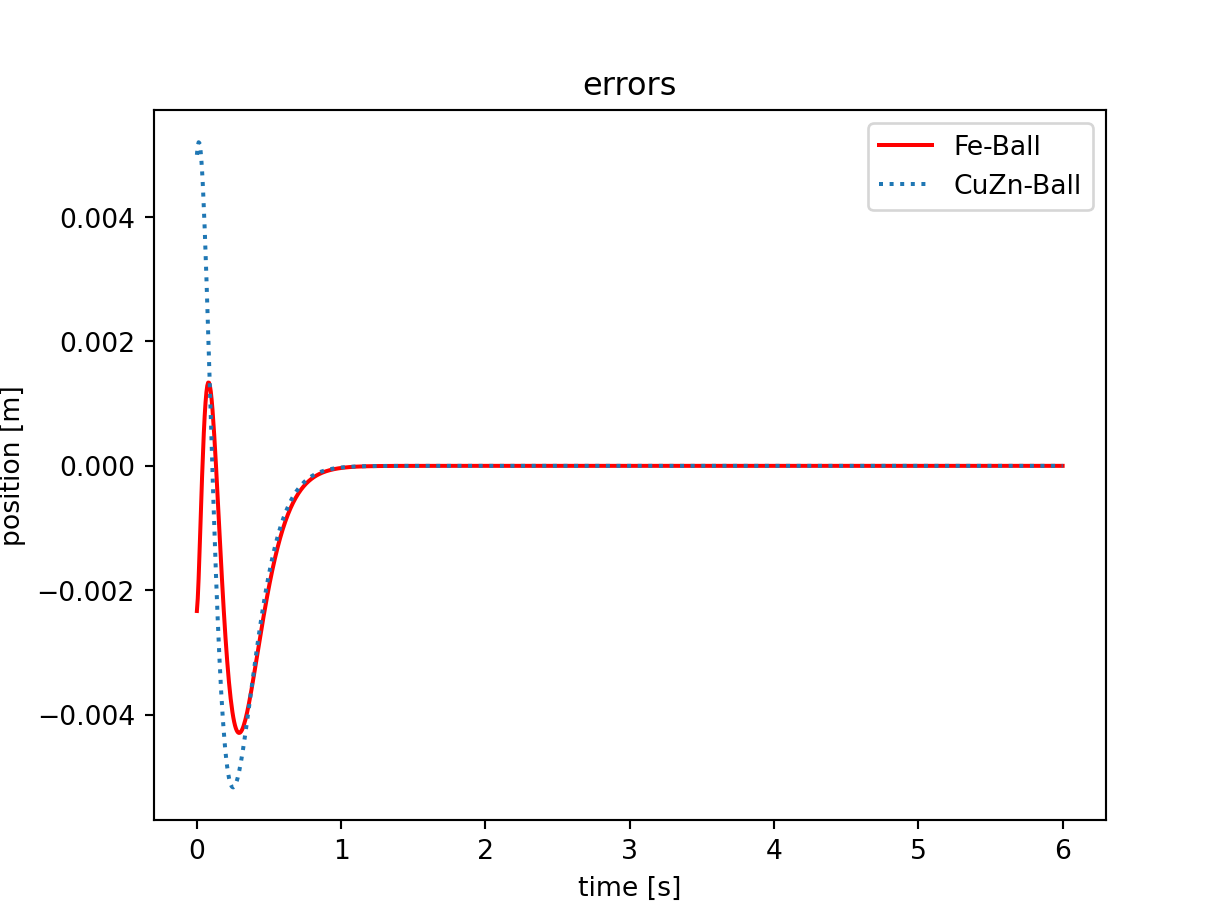
plt.plot(problem_spec.tt2, solution_data.res[:, 0] - solution_data.ploy_p1(problem_spec.tt2), "r", label="Fe-Ball")
plt.plot(
problem_spec.tt2, solution_data.res[:, 1] - solution_data.ploy_p2(problem_spec.tt2), ":", label="CuZn-Ball"
)
plt.title("errors")
plt.xlabel("time [s]")
plt.ylabel("position [m]")
plt.legend(loc=1)
# save image
save_plot_in_dir()
Solved Problems: trajectory tracking of a two mass hovering system |
Used Methods: method_trajectory_planning
Result: Success.
Last Build: Checkout CI Build
Runtime: 8.2 (estimated: 10s)
Plot:
The image of the latest CI job is not available. This is a fallback image.