Automatic Control Knowledge Repository
You currently have javascript disabled. Some features will be unavailable. Please consider enabling javascript.Details for: "SINDy for Lotka Volterra Model"
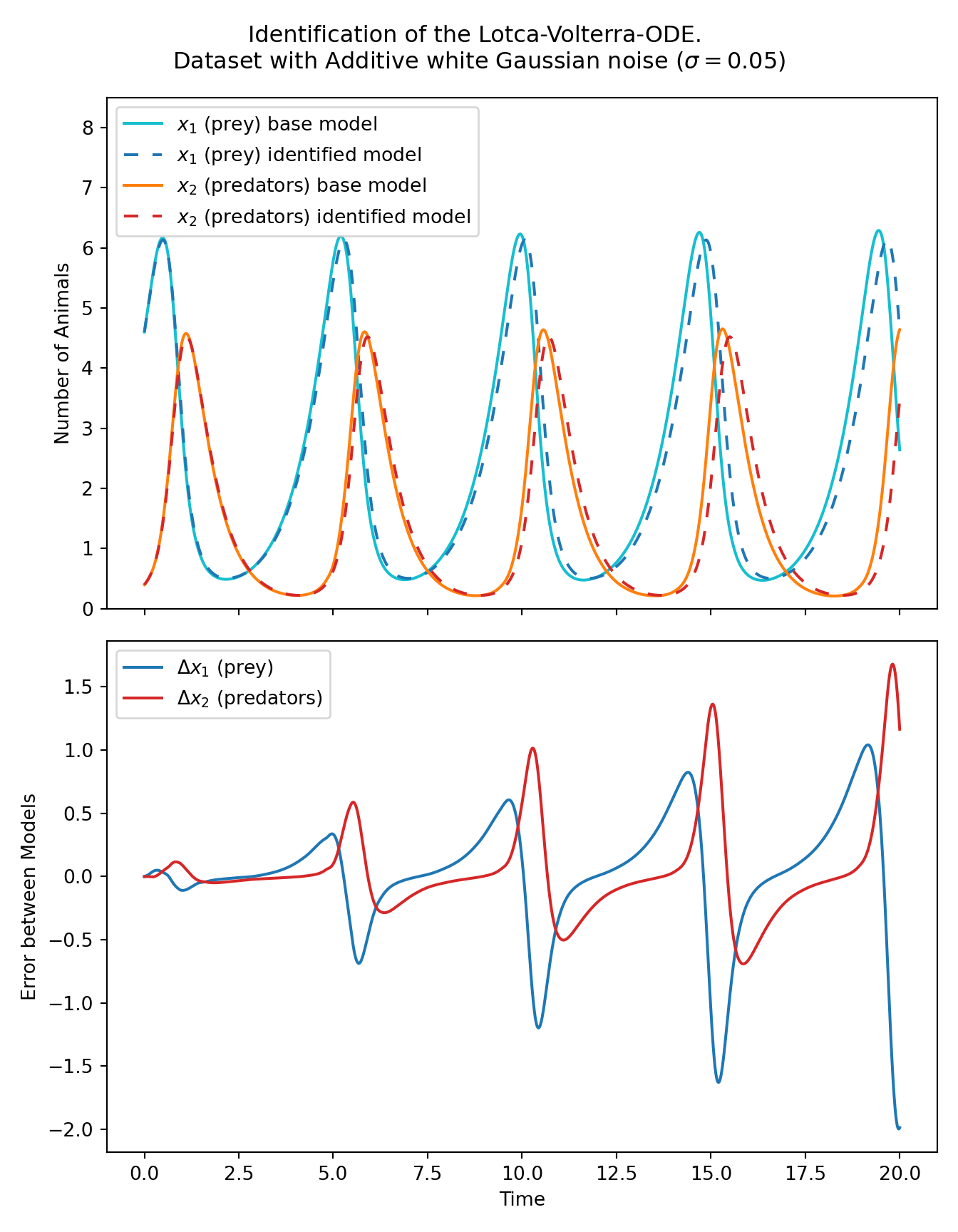
Name: SINDy for Lotka Volterra Model
(Key: QWRHA)
Path: ackrep_data/problem_solutions/PySINDy_identify_volterra View on GitHub
Type: problem_solution
Short Description: reconstructs lotka volterra equations from data using PySINDy
Created: 2022-08-05
Compatible Environment: default_conda_environment (Key: CDAMA)
Source Code [ / ] solution.py
Solved Problems: SINDy for Lotka Volterra Model |
Used Methods:
Result: Success.
Last Build: Checkout CI Build
Runtime: 4.8 (estimated: 15s)
Plot:
The image of the latest CI job is not available. This is a fallback image.
Path: ackrep_data/problem_solutions/PySINDy_identify_volterra View on GitHub
Type: problem_solution
Short Description: reconstructs lotka volterra equations from data using PySINDy
Created: 2022-08-05
Compatible Environment: default_conda_environment (Key: CDAMA)
Source Code [ / ] solution.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import matplotlib.pyplot as plt
import symbtools as st
from scipy.integrate import solve_ivp
import sympy as sp
import os
import numpy as np
from ackrep_core.system_model_management import save_plot_in_dir
import pysindy as ps
from ipydex import IPS
class SolutionData:
pass
def solve(problem_spec):
# identify the model
differentiation_method = ps.FiniteDifference(order=2)
feature_library = ps.PolynomialLibrary(degree=2)
optimizer = ps.STLSQ(threshold=0.2)
sindy_model = ps.SINDy(
differentiation_method=differentiation_method,
feature_library=feature_library,
optimizer=optimizer,
feature_names=["x1", "y2"],
)
# add some noise to training data
xx_train_clean = problem_spec.xx_train.y.transpose()
np.random.seed(1)
xx_train_noisy = xx_train_clean + np.random.normal(scale=0.05, size=xx_train_clean.shape)
sindy_model.fit(xx_train_noisy, t=0.002)
print("Identified Equations:")
sindy_model.print()
# simulate identified model
xx0_test = problem_spec.xx0_test
tt_test = problem_spec.tt_test
xx_test = problem_spec.xx_test.y.transpose()
xx_sim = sindy_model.simulate(xx0_test, tt_test)
# Evolve the new initial condition in time with the SINDy model
fig, axs = plt.subplots(2, 1, sharex=True, figsize=(7, 9))
fig.suptitle(
"Identification of the Lotca-Volterra-ODE. \nDataset with Additive white Gaussian noise $(\sigma=0.05)$"
)
axs[0].plot(tt_test, xx_test[:, 0], color="tab:cyan", label="$x_1$ (prey) base model")
axs[0].plot(tt_test, xx_sim[:, 0], color="tab:blue", linestyle=(0, (5, 5)), label="$x_1$ (prey) identified model")
axs[0].plot(tt_test, xx_test[:, 1], color="tab:orange", label="$x_2$ (predators) base model")
axs[0].plot(
tt_test, xx_sim[:, 1], color="tab:red", linestyle=(0, (5, 5)), label="$x_2$ (predators) identified model"
)
axs[0].legend()
axs[0].set(ylabel="Number of Animals", ylim=(0, 8.5))
axs[1].plot(tt_test, xx_test[:, 0] - xx_sim[:, 0], color="tab:blue", label="$\Delta x_1$ (prey)")
axs[1].plot(tt_test, xx_test[:, 1] - xx_sim[:, 1], color="tab:red", label="$\Delta x_2$ (predators)")
axs[1].legend()
axs[1].set(xlabel="Time", ylabel="Error between Models")
solution_data = SolutionData()
solution_data.xx_sim = xx_sim.transpose()
plt.tight_layout()
save_plot_in_dir()
return solution_data
Solved Problems: SINDy for Lotka Volterra Model |
Used Methods:
Result: Success.
Last Build: Checkout CI Build
Runtime: 4.8 (estimated: 15s)
Plot:
The image of the latest CI job is not available. This is a fallback image.